-
Sponsored by: China Association for Science and Technology (CAST)
Editor-In-Chief: Xu Yida
ISSN 1000-1093
-
Hosted By: China Ordnance Society
Published By: Acta Armamentarii
CN 11-2176/TJ
Sponsored by: China Association for Science and Technology (CAST)
Editor-In-Chief: Xu Yida
ISSN 1000-1093
Hosted By: China Ordnance Society
Published By: Acta Armamentarii
CN 11-2176/TJ
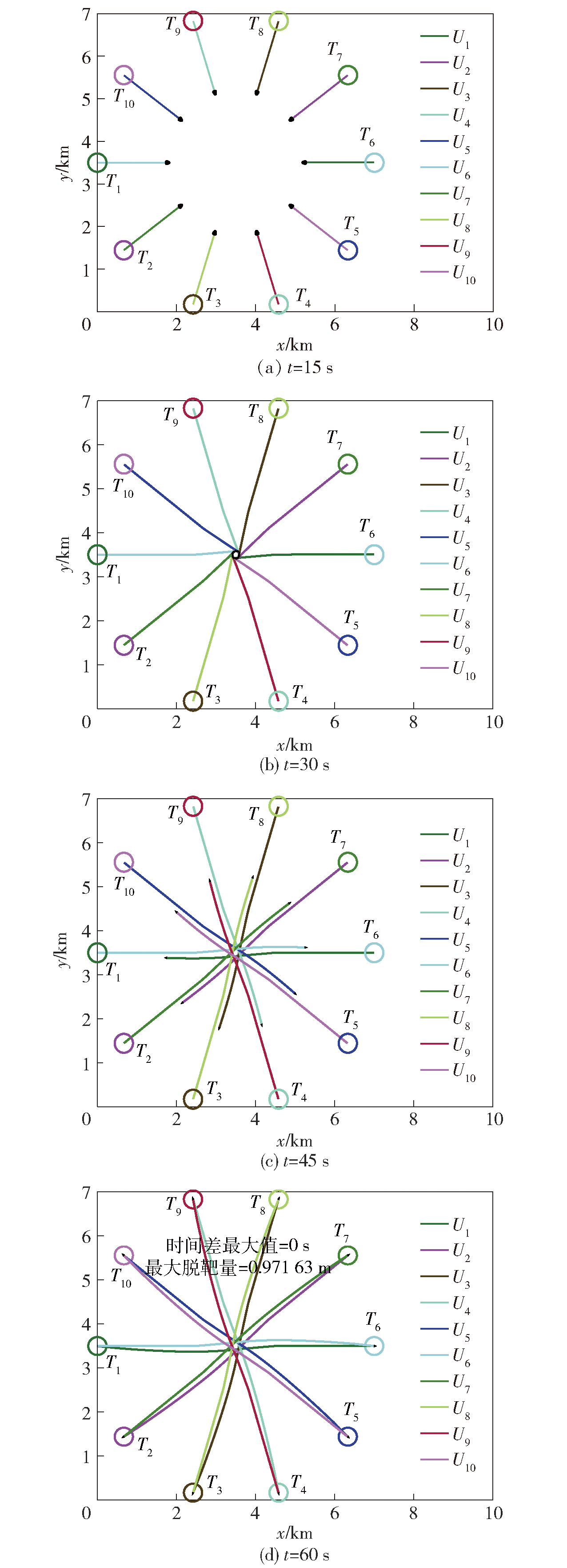
| 飞行器 编号 | 飞行器位置初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1167,3067] | 112 | T6 | [6739,3847] | 30 |
| U2 | [1678,4305] | 118 | T3 | [7625,4390] | 30 |
| U3 | [1515,3897] | 116 | T7 | [6710,3475] | 30 |
| U4 | [1418,3140] | 114 | T10 | [7500,2800] | 30 |
| U5 | [1695,4177] | 120 | T9 | [7137,2887] | 30 |
| U6 | [1763,4363] | 114 | T5 | [6934,4166] | 30 |
| U7 | [1548,4378] | 119 | T2 | [7970,4247] | 30 |
| U8 | [1447,3598] | 112 | T4 | [7253,4361] | 30 |
| U9 | [1134,4234] | 114 | T1 | [8213,3963] | 30 |
| U10 | [2175,3445] | 114 | T8 | [6853,3130] | 30 |