-
Sponsored by: China Association for Science and Technology (CAST)
Editor-In-Chief: Xu Yida
ISSN 1000-1093
-
Hosted By: China Ordnance Society
Published By: Acta Armamentarii
CN 11-2176/TJ
Sponsored by: China Association for Science and Technology (CAST)
Editor-In-Chief: Xu Yida
ISSN 1000-1093
Hosted By: China Ordnance Society
Published By: Acta Armamentarii
CN 11-2176/TJ
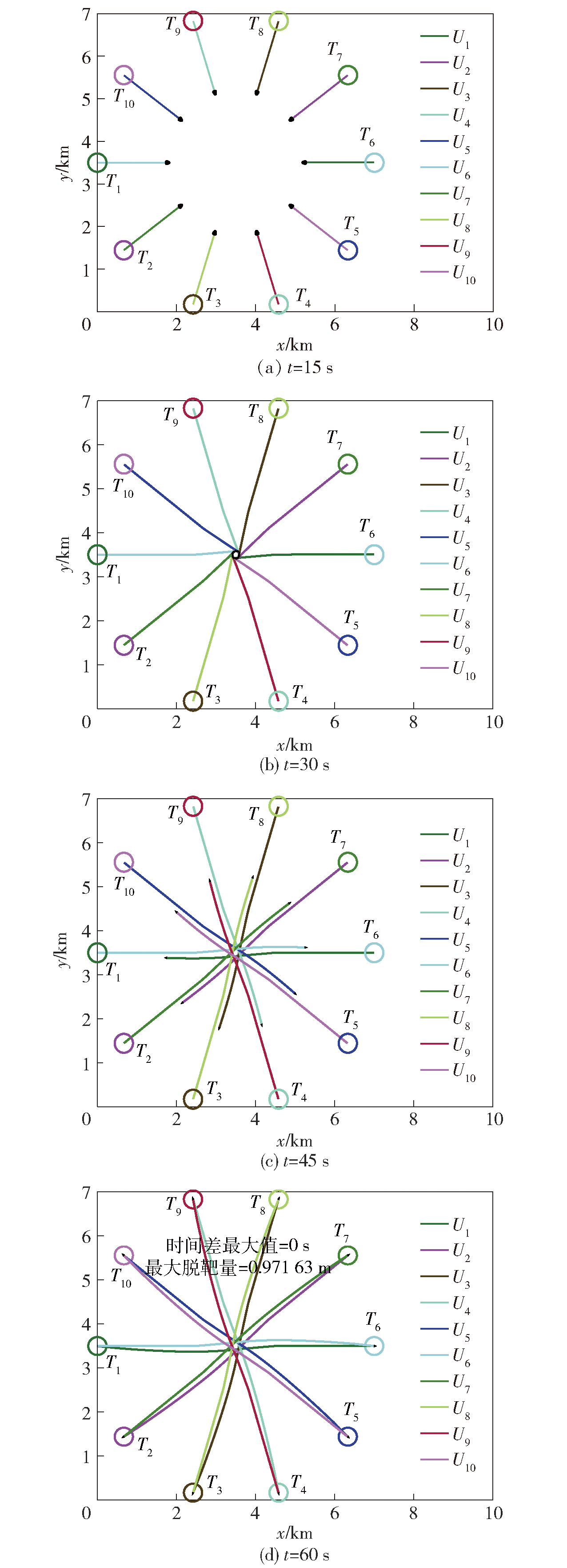
| 飞行器 编号 | 飞行器初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1052,146] | 117 | T5 | [8161,1024] | 30 |
| U2 | [958,1587] | 117 | T8 | [8593,774] | 30 |
| U3 | [957,314] | 116 | T4 | [8161,525] | 30 |
| U4 | [1138,690] | 116 | T1 | [7296,1024] | 30 |
| U5 | [698,675] | 112 | T2 | [7728,774] | 30 |
| U6 | [526,1318] | 118 | T6 | [8161,1523] | 30 |
| U7 | [314,316] | 112 | T9 | [8593,1274] | 30 |
| U8 | [1003,708] | 114 | T7 | [8593,275] | 30 |
| U9 | [291,681] | 119 | T10 | [8593,1773] | 30 |
| U10 | [794,1430] | 119 | T3 | [7728,1274] | 30 |