 PDF(6493 KB)
PDF(6493 KB)
 PDF(6493 KB)
PDF(6493 KB)
PDF(6493 KB)
PDF(6493 KB)
数据和知识双驱动的空中集群目标作战意图识别
Combat Intention Recognition of Air Cluster Targets Driven by Data and Knowledge

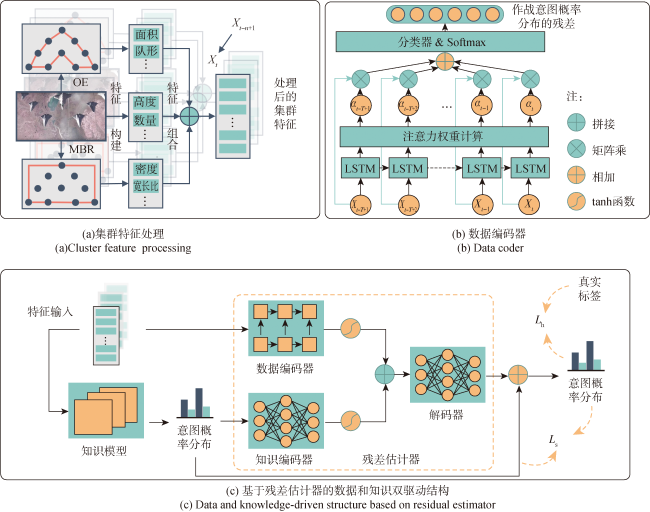
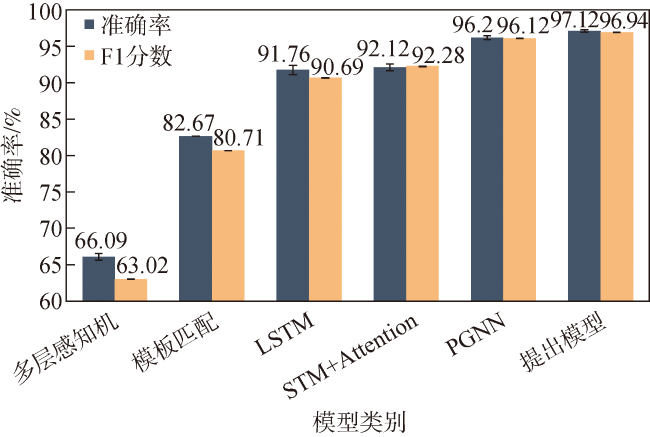
针对集群目标空间特性多元时变和传统数据驱动模型过分依赖经验样本等问题,提出一种针对集群目标的数据和知识双驱动作战意图识别方法。考虑集群目标空间形态等编队特点,构造基于目标编队外包络线和最小外接矩形的集群特征向量,增强敌情数据的特征表达效果;建立基于专家经验的知识模型和结合注意力机制的长短期记忆(Long short-term memory,LSTM)网络模型,基于专家经验的知识模型根据约束规则生成意图预识别向量,LSTM模型预测输出意图概率分布的残差;利用一种可学习的残差估计器结构,自适应调整双模型的融合比率,并设计多目标损失函数控制双模型的影响权重,最终通过双模型的融合有效克服传统数据模型高精度和数据样本不足的矛盾。实验表明,提出方法的精度相比LSTM和Attention-LSTM分别提升约5.34%和4.98%,且对样本量的依赖性显著低于传统数据驱动方法。
Aiming at the diverse spatiotemporal characteristics of cluster targets and the excessive reliance of traditional data driven models on empirical samples,this paper proposes an algorithm for combat intent recognition driven by both data and knowledge.A cluster feature vector based on the virtual envelope and minimum bounding rectangle of target formation are constructed to enhance the feature expression of enemy situation data,which takes the cluster characteristics,such as the spatial form of cluster targets,into account.A knowledge model based on military expert experience and a long short-term memory (LSTM) network model with attention mechanism are established then.The knowledge model generates the intent pre-recognition vectors based on constraint rule,while the LSTM network model predicts the residual of intent probability distribution.The fusion ratio of both models is adaptively adjusted by utilizing a learnable residual estimator structure.A multi-objective loss function is designed to control the influence weights of the dual models.Ultimately,the fusion of the dual models overcomes the contradiction between the high accuracy of traditional data models and the insufficient data samples.Experimental results indicate that the proposed method improves the recognition accuracy to about 5.34% and 4.98% compared to LSTM and Attention-LSTM,respectively,and has significantly lower dependence on sample size than traditional data-driven methods.
集群目标 / 作战意图 / 数据驱动 / 知识驱动 / 注意力机制 {{custom_keyword}} /
cluster targets / combat intent / data driving / knowledge driving / attention mechanism {{custom_keyword}} /
表1 考虑的目标特征Table 1 Target features considered in this paper |
| 运动学特征 | 状态特征 | 电磁频谱特征[12] |
|---|---|---|
| 水平位置 | 方位角 | 脉冲宽度 |
| 速度 | 航向角 | 脉冲重复频率 |
| 加速度 | 高度 | 载波频率 |
表2 典型无人战斗机的突防意图模板Table 2 Template for penetration intention of typical unmanned fighter |
| 参数 | 速度/(m·s-1) | 加速度/ (m·s-2) | 高度/m | 航向 变化率/(°) | 脉冲宽度/μs | 脉冲重复 频率/MHz | 载波频率/GHz | 意图 |
|---|---|---|---|---|---|---|---|---|
| 典型值 | 30~50 | 0.15~1.5 | 300~1600 | 0~15 | 4~8 | 5~9 | 1.5~4.5 | 突防 |
| 允许值 | 20~90 | 0~1.6 | 250~2000 | 0~50 | 0~12 | 0~11 | 0~7.5 |
表3 模型消融实验Table 3 Model ablation experiment |
| LSTM | 注意力 机制 | 集群 特征 | 残差估 计器 | 准确率/% | 标准差/% |
|---|---|---|---|---|---|
| P | 91.76 | 0.62 | |||
| P | P | 92.12 | 0.47 | ||
| P | P | 95.68 | 0.28 | ||
| P | P | P | 96.32 | 0.25 | |
| P | P | P | P | 97.10 | 0.19 |
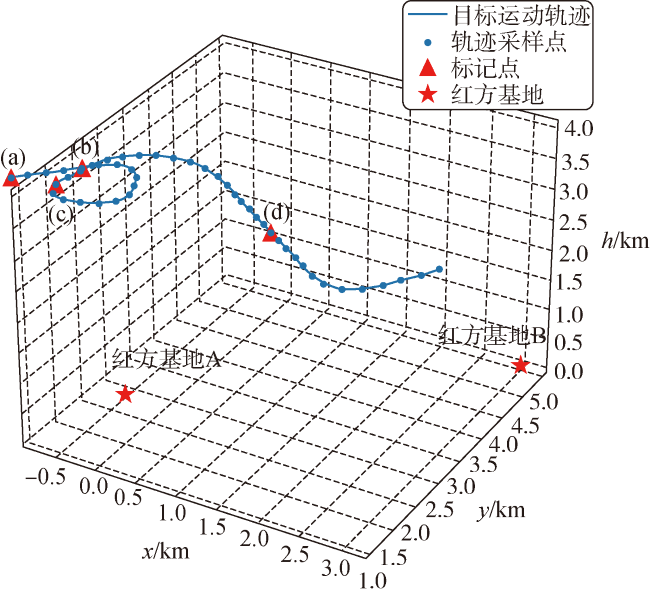
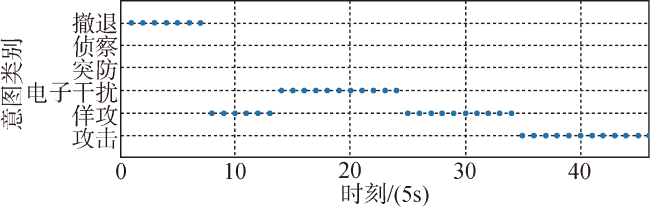
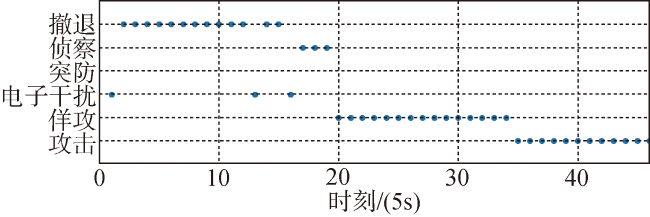
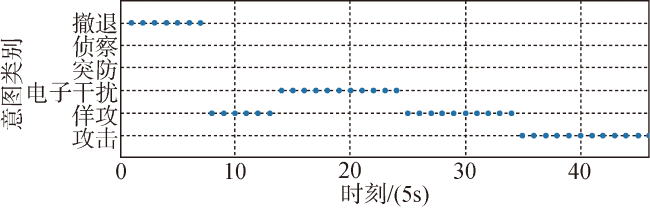
表4 作战想定描述Table 4 Description of combat scenarios |
| 阶段 | 作战情形 | 实际意图 |
|---|---|---|
| (a)~(b) | 蓝方目标保持纵队并开始接近红方基地A。 | - |
| (b)~(c) | 该目标在红方基地A的上空徘徊飞行并实施电子干扰,以配合蓝方的其余空中作战力量对基地A实施打击。 | 电子干扰 |
| (c)~(d) | 红方基地A在(c)时刻被摧毁,红方开始在基地B上空部署一些空中防御兵力。该蓝方目标变换队形为菱形,欲缓缓下降高度并靠近红方基地B,发动佯攻战术以吸引红方的攻击火力。 | 佯攻 |
| (d)之后 | 该目标在(d)时刻开始加速飞行,试图配合蓝方的其余空中作战力量共同对红方基地B实施打击,飞行一段时间后开启雷达追踪模式,转弯朝向红方空中兵力发起突袭进攻。 | 攻击 |
| [1] |
李伟生, 王宝树. 实现态势估计的一种模板匹配算法[J]. 计算机科学, 2006, 33(5):229-230,249.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
吉祥. 基于聚类分群与模板匹配的态势估计方法研究[D]. 国防科学技术大学, 2016.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
李香亭. 态势估计中目标意图识别的研究与实现[D]. 中北大学, 2012.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
赵福均, 周志杰, 胡昌华. 基于置信规则库和证据推理的空中目标意图识别方法[J]. 电光与控制, 2017, 24(8):15-19.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
蒲志强, 易建强, 刘振. 知识和数据协同驱动的群体智能决策方法研究综述[J]. 自动化学报, 2022, 48(3):627-643.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
乔殿峰, 梁彦, 马超雄. 多域作战下的群目标意图识别与预测[J]. 系统工程与电子技术, 2022, 44(11):3403-3412.
多域作战具有实体多类、队形多变、意图多样等诸多挑战,难以综合利用多元知识,因而主要依靠人工判决,以至于自动化水平不高。为了实现计算机自动推演态势,需要解决知识的图形化建模和意图推理综合两大难题。对此,在空海域管控知识图谱的基础上,搭建了多域作战战术规则库、编队队形与场景态势的映射关系,提出了基于多实体分层贝叶斯网络的群目标意图识别与预测方法。首先,运用群内目标实体的状态和事件信息,构建目标作战实体行为推理层。其次,利用综合作战实体的时序规则、双方相对距离及航向等信息,构建同类目标元意图推理层。最后,利用实体序列协作关系及编队队形信息,构建多域作战下的群目标总意图推理层。以航母群活动仿真数据为例,验证了所提算法能够获得较为可靠的意图推理结果。
There are many challenges in multi-domain operations, such as multiple entities, changeable formations and diverse intentions, which make it difficult to comprehensively utilize multiple knowledge. Therefore, manual judgment is mainly used, resulting in a low level of automation. In order to realize the automatic deduction of the situation by the computer, two difficult problems need to be solved: the graphical modeling of knowledge and the synthesis of intention reasoning. Based on the knowledge map of airspace management and control, a multi-domain operational tactical rule base, the mapping relationship between formation and scene situation is built. A multi-entity hierarchical Bayesian network-based group target intent recognition and prediction method is proposed. Firstly, the state and event information of the target entity in the group is used to construct the behavioral reasoning layer of the target combat entity. Secondly, based on the temporal rules, relative distance and heading information of combat entities, a reasoning layer of similar target element intention is constructed. Finally, the general intention reasoning layer of group targets under multi-domain operations is constructed by using the entity sequence collaboration relationship and formation information. Taking the simulation data of aircraft carrier group activities as an example, it is verified that the algorithm proposed in this paper can obtain relatively reliable intention inference results. {{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
李战武, 李双庆, 彭明毓. 基于注意力机制改进的LSTM空战目标意图识别方法[J]. 电光与控制, 2023, 30(3):1-7.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
李峰, 王琦, 胡健雄. 数据与知识联合驱动方法研究进展及其在电力系统中应用展望[J]. 中国电机工程学报, 2021, 41(13): 4377-4390.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
葛顺. 基于规则发现和贝叶斯推理的战术意图识别技术[D]. 哈尔滨工程大学, 2015.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
张建廷, 周万宁, 晏谢飞. 基于LSTM和模糊推理的海上目标行为意图智能预测方法[J]. 中国电子科学研究院学报, 2022, 17(9):897-904.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
余源丰. 群目标态势推理关键技术研究[D]. 西安电子科技大学, 2020.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
陈刚, 姚丽亚, 王国新. 面向鲁棒决策的战场态势评估人机共识形成方法[J]. 兵工学报, 2022, 43(11):2953-2964.
针对地面突击装备战术级、高动态、分布式、强实时作战过程中的战场态势高度复杂且信息不确定问题,提出一种面向鲁棒决策的战场态势评估人机共识形成方法,实现“人类智能”与“人工智能”在综合态势评估中的有机融合。首先,通过采集乘员(专家)态势评估行为实验样本,模拟乘员(专家)对战场态势信息的认知过程,构建战场态势评估两级智能代理模型;其次,提出一种对人机偏好不敏感的决策鲁棒指数,车辆乘员基于该指数在高强度对抗下快速判断形成人机共识,辅助指挥员进行鲁棒决策。在某作战仿真系统中进行了红蓝对抗的想定设计,并以敌方意图为态势评估对象进行了案例验证,验证了该方法的有效性。
Ground assault equipment tactical-level, highly dynamic, distributed, and strong real-time operations have the characteristics of battlefield complexity and information uncertainty, to address these characteristics this paper proposes a human-machine consensus formation method for battlefield situation assessment robust decision making, which fuses “human intelligence” and “artificial intelligence” to achieve comprehensive situational assessment. First, by collecting experimental samples of crew members (‘experts’) situational assessment behaviors and simulating their cognitive process of battlefield situational information, a two-level intelligent agent model for battlefield situational assessment is constructed. Then, a decision robustness index that is insensitive to human-machine preferences is proposed, based on which vehicle crew members quickly judge and form human-machine consensus under high-intensity confrontation, and assist commanders in making robust decisions. We design a red-blue confrontation scenario in a battle simulation system, and use an enemy combat intent recognition example to test the utility of the proposed method.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
The use of 2D alpha-shapes (α-shapes) to quantify morphological features of the retinal microvasculature could lead to imaging biomarkers for proliferative diabetic retinopathy (PDR). We tested our approach using the MESSIDOR dataset that consists of colour fundus photographs from 547 healthy individuals, 149 with mild diabetic retinopathy (DR), 239 with moderate DR, 199 pre-PDR and 53 PDR. The skeleton (centrelines) of the automatically segmented retinal vasculature was represented as an α-shape and the proposed parameters, complexity ([Formula: see text]), spread (OpA), global shape (VS) and presence of abnormal angiogenesis (Grad) were computed. In cross-sectional analysis, individuals with PDR had a lower [Formula: see text], OpA and Grad indicating a vasculature that is more complex, less spread (i.e. dense) and the presence of numerous small vessels. The results show that α-shape parameters characterise vascular abnormalities predictive of PDR (AUC 0.73; 95% CI [0.73 0.74]) and have therefore potential to reveal changes in retinal microvascular morphology.© 2021. The Author(s).
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
彭正初. 基于傅里叶描述子的物体形状识别的研究[D]. 哈尔滨工业大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [19] |
郑志伟, 管雪元, 傅健. 基于卷积神经网络与长短期记忆神经网络的弹丸轨迹预测[J]. 兵工学报, 2023, 44(10):2975-2983.
To solve the problem of nonlinear trajectory prediction of projectile, a novel hybrid trajectory prediction model based on convolutional neural network (CNN) and long and short-term memory (LSTM) neural network is proposed. A 6DOF projectile movement model is established, and a substantial dataset of trajectory samples is obtained through exterior ballistics simulations employing the four-order Runge-Kutta method. Secondly, the hybrid CNN-LSTM trajectory prediction model is proposed, and the input and output trajectory data pairs are constructed by using the sliding window method and first-order difference method, which transforms the prediction problem into a supervised learning problem. Then, the proposed model is compared with LSTM neural network model, gated recurrent unit (GRU) neural network model and back propagation (BP) neural network model using the same dataset. The results show that the average cumulative prediction error of CNN-LSTM model after 3s is about 14.83m in the x-axis direction, 20.77m in the y-axis direction and 0.75m in the z-axis direction. The trajectory prediction accuracy of CNN-LSTM neural network model is better than that of a single model, which provides valuable insights for advancing projectile trajectory prediction research. {{custom_citation.content}}
{{custom_citation.annotation}}
|
| [20] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [21] |
周志华. 机器学习[M]. 北京: 清华大学出版社, 2016.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [22] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
PDF(6493 KB)
 表1 考虑的目标特征表2 典型无人战斗机的突防意图模板
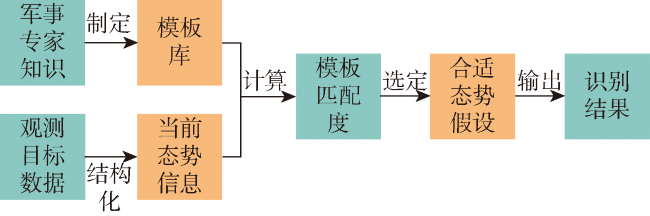
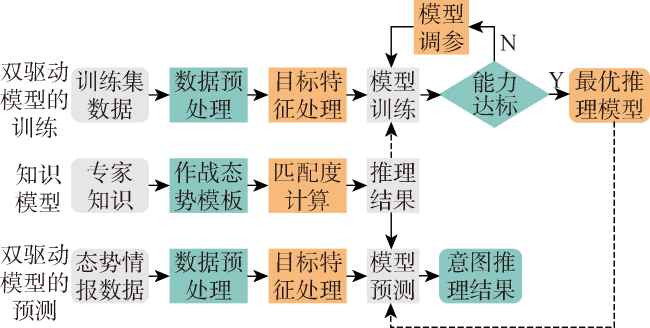
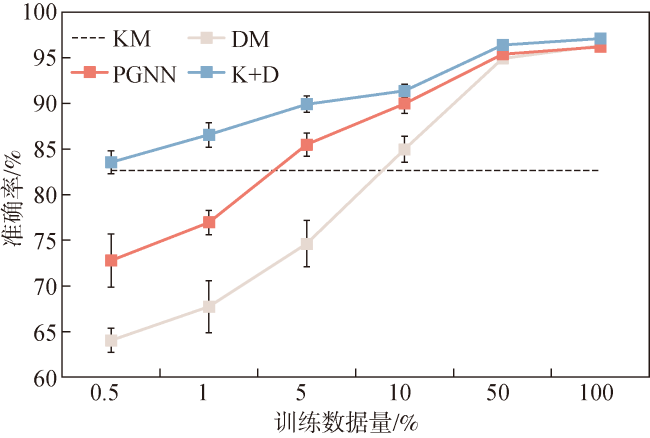
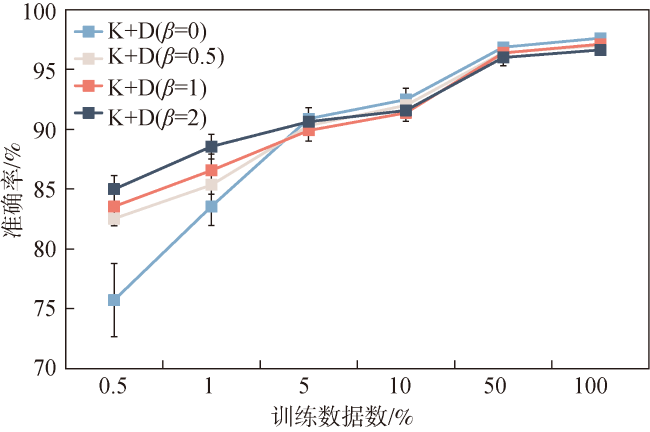
表1 考虑的目标特征表2 典型无人战斗机的突防意图模板 图1 基于模板匹配的知识驱动意图识别图2 数据和知识双驱动作战意图识别框架图3 双驱动模型的训练和识别流程表3 模型消融实验图4 不同模型的性能比较图5 不同样本量下的模型识别精度图6 软性损失系数β、样本量N和精度的关系图7 作战想定下的目标运动轨迹表4 作战想定描述图8 DM的识别结果图9 KM的识别结果图10 提出模型的识别结果
图1 基于模板匹配的知识驱动意图识别图2 数据和知识双驱动作战意图识别框架图3 双驱动模型的训练和识别流程表3 模型消融实验图4 不同模型的性能比较图5 不同样本量下的模型识别精度图6 软性损失系数β、样本量N和精度的关系图7 作战想定下的目标运动轨迹表4 作战想定描述图8 DM的识别结果图9 KM的识别结果图10 提出模型的识别结果/
| 〈 |
|
〉 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}