
网络化弹药起爆控制半实物仿真测试方法
Hardware-in-the-loop Simulation Test Method for Detonation Control of Networked Munitions

针对网络化弹药起爆控制功能靶场测试成本高、可重复性差等问题,提出一种基于QualNet仿真平台的网络化弹药动态起爆控制半实物仿真测试方法。基于该测试方法架构,设计了联通真实网络与仿真网络的半实物交互接口,实现了实物原理样机与网络化弹药仿真模型间的实时数据交互;开发了安全系统动态运行监控软件,通过该界面指挥中心可对弹药节点进行远程动态控制与状态信息监测;为保证控制指令等数据报文的可靠实时传输,定义了监控软件与安全起爆控制模块间的应用层通信协议;对网络化弹药远程解保、远程动态起爆控制功能及半实物交互接口时延进行了测试。研究结果表明:该测试方法不仅具有较强的可行性和有效性,而且具有良好的实时性。
To solve the problems of high cost and poor repeatability of the range test of the detonation control function of networked munitions, a hardware-in-the-loop simulation test method for the dynamic detonation control of networked munitions based on QualNet is proposed. A hardware-in-the-loop interface between the real network and the simulation network is designed. Based on the interface, the real-time data interaction between the physical equipment and the networked munitions simulation model is realized. Then, a dynamic monitoring software of the safety system is developed. Through the software, the command center can control and monitor the status of the munitions node. At the same time, in order to ensure the reliable and real-time transmission of control command and other types of messages, an application layer communication protocol between the monitoring software and the safe detonation control module is defined. The remote arming and detonation control function of the networked munitions as well as the time delay of the hard-in-the-loop interface are tested. The results show that the proposed method is feasible and effective, which has good real-time performance.
网络化弹药 / 半实物仿真 / 数据交互接口 / 通信协议 {{custom_keyword}} /
networked munitions / hardware-in-the-loop simulation / data interaction interface / communication protocol {{custom_keyword}} /
表1 控制报文格式及含义Table 1 Control message format and meaning |
| 序号 | 含义 | 格式 | 序号 | 含义 | 格式 | |
|---|---|---|---|---|---|---|
| 1 | 帧头 | EB | 6 | 通道号 | 00 | |
| 2 | 90 | 7 | 备用 | 00 | ||
| 3 | 帧计数 | CNT | 8 | 00 | ||
| 4 | 指令码 | D1 | 9 | 和校验 | ADDH | |
| 5 | 电台号 | 0X01 | 10 | ADDL |
表2 回复报文格式及含义Table 2 Reply message format and meaning |
| 序号 | 含义 | 格式 |
|---|---|---|
| 1 | 帧头 | AA |
| 2 | 55 | |
| 3 | 电台号 | 0X01 |
| 4 | 帧计数 | CNT |
| 5~7 | 状态字0、1、2 | |
| 8~11 | 保留 | |
| 12~14 | A、B、C通道储能电压 | |
| 15 | 和校验 | ADDH |
| 16 | ADDL |
表3 状态字0格式及含义Table 3 Status word 0 format and meaning |
| 状态字位 | 含义 | 参数设置 |
|---|---|---|
| D7 | 保留 | |
| D6 | 保留 | |
| D5 | 二级保险 | 0表示未解除,1表示已解除 |
| D4 | 一级保险 | 0表示未解除,1表示已解除 |
| D3 | 保留 | |
| D2 | 保留 | |
| D1 | 自检是否完成 | 0表示正在自检,1表示自检完成 |
| D0 | 设备是否工作正常 | 0表示故障,1表示正常 |
表4 状态字1格式及含义Table 4 Status word 1 format and meaning |
| 状态字位 | 含义 | 参数设置 |
|---|---|---|
| D7 | 保留 | |
| D6 | C通道高压建立情况 | 0表示未完成, 1表示完成 |
| D5 | B通道高压建立情况 | 0表示未完成, 1表示完成 |
| D4 | A通道高压建立情况 | 0表示未完成, 1表示完成 |
| D3 | 保留 | |
| D2 | C通道三级保险 | 0表示正常, 1表示错误 |
| D1 | B通道三级保险 | 0表示正常, 1表示错误 |
| D0 | A通道三级保险 | 0表示正常, 1表示错误 |
表5 状态字2格式及含义Table 5 Status word 2 format and meaning |
| 状态字位 | 含义 | 参数设置 |
|---|---|---|
| D7 | 保留 | |
| D6 | 保留 | |
| D5 | 保留 | |
| D4 | 保留 | |
| D3 | 保留 | |
| D2 | C通道升压报错 | 0表示正常, 1表示错误 |
| D1 | B通道升压报错 | 0表示正常, 1表示错误 |
| D0 | A通道升压报错 | 0表示正常, 1表示错误 |
| [1] |
汪翼. 网络化弹药协同作战效能评估系统设计与研究[D]. 成都: 电子科技大学, 2011.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [2] |
张从泾, 白文华, 郑红生. 智能化弹药巡飞弹最新发展概述及展望[J]. 国防制造技术, 2021(1):3-7.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [3] |
王庆权, 王丽美, 夏昆华, 等. 网络化巡飞攻击弹药鉴定试验方法研究[J]. 军械工程学院学报, 2014, 26(6):63-68.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [4] |
姜尚, 田福庆, 孙世岩, 等. 含攻击角约束的网络化弹药分布式模糊协同制导律[J]. 控制理论与应用, 2020, 37(1):118-128.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [5] |
王昊宇, 徐学强, 房玉军. 网络化协同打击弹药技术[J]. 兵工学报, 2010, 31(增刊2):136-139.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [6] |
徐怀来. 用智能重塑全域作战能力[N]. 解放军报,2018-10-02(3).
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [7] |
耿海军. 信息化弹药:欲领未来弹药潮流[J]. 中国民兵, 2009(9):52-53.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [8] |
晁芳群, 杜剑英, 穆高超, 等. 智能化弹药靶场试验测试现状及发展方向[J]. 火力与指挥控制, 2014, 39(8):181-184.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [9] |
伍俊洪, 杨洋, 李惠杰, 等. 网络仿真方法和OPNET仿真技术[J]. 计算机工程, 2004(5):106-108.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [10] |
岳超, 刘满国, 王健, 等. 我国智能弹药仿真技术发展综述[C]//2021 全国仿真技术学术会议论文集. 贵阳: 中国计算机用户协会仿真应用分会, 2021:32-34.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [11] |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [12] |
刘延斌, 金光. 半实物仿真技术的发展现状[J]. 光机电信息, 2003(1):27-32.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [13] |
郑国, 杨锁昌, 张宽桥. 半实物仿真技术的研究现状及发展趋势[J]. 舰船电子工程, 2016, 36(11):8-11.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [14] |
穆乐, 许谦, 亢锐, 等. 一种应用于多飞行器跟踪拍摄的控制系统半实物仿真虚拟环境设计与实现[J]. 宇航总体技术, 2022, 6(1):18-21.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [15] |
任淑红, 吴晓燕, 张庆波. 现代导弹半实物仿真技术探讨[J]. 飞航导弹, 2006(5):54-56.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [16] |
胥凤驰, 谢杨柳, 董洁琳, 等. 基于半实物仿真的水面无人艇测试系统构建方法[J]. 无人系统技术, 2022, 5(1):80-87.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [17] |
闫晓伟, 谭思炜, 孙强, 等. 鱼雷电磁引信半实物仿真试验系统设计[J]. 舰船电子工程, 2021, 41(10):99-103.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [18] |
王召阳, 常家辉, 白子龙. 美军仿真技术及其应用现状分析[J]. 兵工自动化, 2021, 40(10):66-69.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [19] |
高康. 面向空间攻防对抗的半实物仿真技术研究[D]. 北京: 北京交通大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [20] |
李嘉轩, 杨雪榕, 杨雅君, 等. 智能集群仿真与实验验证研究综述[C]//第22届中国系统仿真技术及其应用学术年会论文集. 重庆: 中国自动化学会系统仿真专业委员会, 2021:141-149.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [21] |
张翔, 闫俊良, 刘梦焱, 等. 导弹半实物仿真系统通用设计规范[C]//2021 全国仿真技术学术会议论文集. 贵阳: 中国计算机用户协会仿真应用分会, 2021:125-128,220.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| [22] |
黄建强, 鞠建波. 半实物仿真技术研究现状及发展趋势[J]. 舰船电子工程, 2011, 31(7):5-7,25.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
 图1 网络化弹药半实物仿真测试系统架构图2 RVIP接口示意图图3 数据包注入仿真网络图4 动态控制模块界面效果图图5 实时监测模块界面效果图图6 状态信息打印模块界面效果图
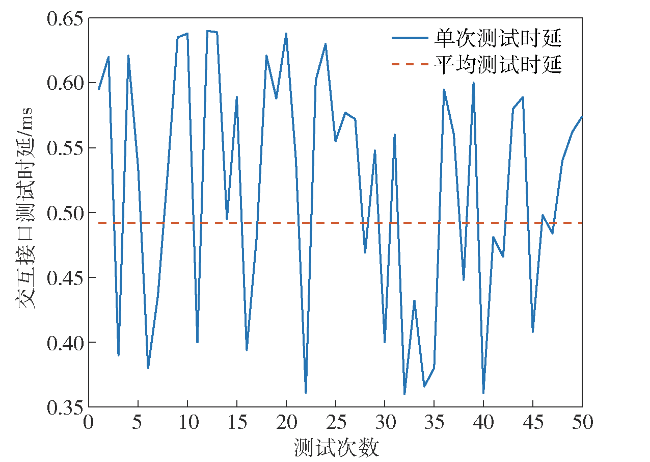
图1 网络化弹药半实物仿真测试系统架构图2 RVIP接口示意图图3 数据包注入仿真网络图4 动态控制模块界面效果图图5 实时监测模块界面效果图图6 状态信息打印模块界面效果图 表1 控制报文格式及含义表2 回复报文格式及含义表3 状态字0格式及含义表4 状态字1格式及含义表5 状态字2格式及含义图7 测试系统设备连接示意图图8 测试系统设备实物图图9 基于QualNet仿真平台的网络化弹药仿真场景图10 仿真过程数据流向图图11 解除3级保险实验结果图图12 解除3级保险实验示波器响应曲线图图13 远程起爆实验结果图14 远程起爆实验示波器响应曲线图15 安全系统状态运行监控模型交互时延
表1 控制报文格式及含义表2 回复报文格式及含义表3 状态字0格式及含义表4 状态字1格式及含义表5 状态字2格式及含义图7 测试系统设备连接示意图图8 测试系统设备实物图图9 基于QualNet仿真平台的网络化弹药仿真场景图10 仿真过程数据流向图图11 解除3级保险实验结果图图12 解除3级保险实验示波器响应曲线图图13 远程起爆实验结果图14 远程起爆实验示波器响应曲线图15 安全系统状态运行监控模型交互时延/
| 〈 |
|
〉 |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}